

某興趣小組研制的智能操作機器人,如圖1,水平操作臺為l,高AB為50cm,連桿BC長度為70cm,手臂CD的長度為60cm,B,C是轉動點,且AB、BC與CD始終在同一平面內.
(1)轉動連桿BC,手臂CD,使∠ABC=143°,CD∥l,如圖2,求手臂端點D離操作臺l的高度DE的長(精確到1cm,參考數據:sin53°≈0.8,cos53°≈0.6).
(2)物品在操作臺l上,距離底座A端122cm的點M處,轉動連桿BC,手臂端點D能否碰到點M?請說明理由.

【考點】解直角三角形的應用.
【答案】(1)92cm.
(2)不能.
(2)不能.
【解答】
【點評】
聲明:本試題解析著作權屬菁優網所有,未經書面同意,不得復制發布。
發布:2025/5/22 15:30:1組卷:317引用:2難度:0.7
相似題
-
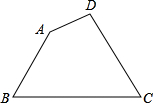 1.如圖2,有一塊四邊形的鐵板余料ABCD,經測量AB=50cm,BC=108cm,CD=60cm,且tanB=tanC=,若要從這塊余料中裁出頂點M、N在邊BC上且面積最大的矩形PQMN,則該矩形的面積為cm2.43發布:2025/5/24 8:30:1組卷:1218引用:2難度:0.1
1.如圖2,有一塊四邊形的鐵板余料ABCD,經測量AB=50cm,BC=108cm,CD=60cm,且tanB=tanC=,若要從這塊余料中裁出頂點M、N在邊BC上且面積最大的矩形PQMN,則該矩形的面積為cm2.43發布:2025/5/24 8:30:1組卷:1218引用:2難度:0.1 -
2.如圖,某條道路上通行車輛限速為60千米/小時,在離道路50米的點P處建一個監測點,道路的AB段為監測區.在△ABP中,已知∠A=45°,∠B=30°,車輛通過AB段的時間在多少秒以內時,可認定為超速?(精確到0.1秒)(參考數據:
=1.732)3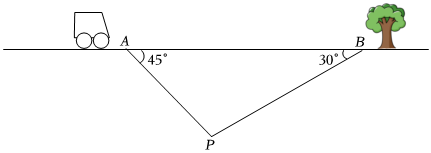 發布:2025/5/24 10:0:2組卷:404引用:4難度:0.6
發布:2025/5/24 10:0:2組卷:404引用:4難度:0.6 -
3.圖1是某型號挖掘機,該挖掘機是由基座、主臂和伸展臂構成.圖2是某種工作狀態下的側面結構示意圖(MN是基座的高,MP是主臂,PQ是伸展臂,EM∥QN).已知基座高度MN為1m,主臂MP長為5m,測得主臂伸展角.∠PME=37°.
(參考數據:sin37°≈,tan37°≈35,sin53°≈34,tan53°≈45)43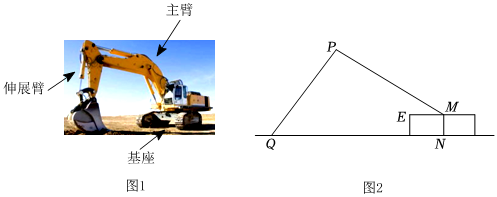
(1)求點P到地面的高度;
(2)若挖掘機能挖的最遠處點Q到點N的距離為7m,求∠QPM的度數.發布:2025/5/24 10:30:2組卷:2478引用:13難度:0.4