

2022年江蘇省鹽城市景山中學中考物理三模試卷
發布:2024/12/23 19:30:3
一、選擇題(共12小題,每小題2分,共24分,每小題只有一個選項符合要求)
-
1.下列數據中,符合實際情況的是( )
組卷:16引用:1難度:0.5 -
2.生活中有許多光學知識,下列說法合理的是( )
組卷:143引用:6難度:0.7 -
 3.如圖所示是“天和”核心艙機械臂,機械臂的功能類似于人的手臂,它有7個關節,長度可達10多米,具有抓住、拉回、鎖死等功能。下列用具使用時與機械臂屬于同一類杠桿的是( )組卷:364引用:10難度:0.7
3.如圖所示是“天和”核心艙機械臂,機械臂的功能類似于人的手臂,它有7個關節,長度可達10多米,具有抓住、拉回、鎖死等功能。下列用具使用時與機械臂屬于同一類杠桿的是( )組卷:364引用:10難度:0.7 -
 4.2022年3月23日中國空間站“天宮課堂”第二課正式開講,王亞平利用水和兩塊塑料板搭建了一座液橋,如圖所示,搭建液橋利用了( )組卷:193引用:2難度:0.7
4.2022年3月23日中國空間站“天宮課堂”第二課正式開講,王亞平利用水和兩塊塑料板搭建了一座液橋,如圖所示,搭建液橋利用了( )組卷:193引用:2難度:0.7 -
 5.為確保2022年北京冬奧會順利舉行,需要進行人工造雪。造雪機在工作時,不斷將水吸入,并持續從前方噴出“白霧”,在“白霧”下方沉積成一層“白雪”,如圖所示。造雪機在造雪過程中,水發生的最主要物態變化是( )組卷:1720引用:31難度:0.9
5.為確保2022年北京冬奧會順利舉行,需要進行人工造雪。造雪機在工作時,不斷將水吸入,并持續從前方噴出“白霧”,在“白霧”下方沉積成一層“白雪”,如圖所示。造雪機在造雪過程中,水發生的最主要物態變化是( )組卷:1720引用:31難度:0.9 -
6.下列說法正確的是( )
組卷:603引用:9難度:0.6 -
 7.如圖所示是“擦窗機器人”,通過真空泵將其“腹部”吸盤內的空氣向外抽出,進而牢牢地吸在豎直玻璃上。以下說法正確的是( )組卷:209引用:6難度:0.5
7.如圖所示是“擦窗機器人”,通過真空泵將其“腹部”吸盤內的空氣向外抽出,進而牢牢地吸在豎直玻璃上。以下說法正確的是( )組卷:209引用:6難度:0.5 -
8.測量電流時,需要將電流表串聯在電路中,通常,電流表的電阻比待測電路的電阻小得多,因此對測量值的影響可以忽略不計,下列研究方法與此相同的是( )
組卷:38引用:2難度:0.8 -
 9.某質量為m的物體以初速度v0從斜面底部A點沿斜面上滑,當物體上滑到B點時速度大小為vB,滑到C點時速度為0。然后物體從C點下滑,到達AB中點D時速度大小又為vB,則下列說法正確的是( )組卷:128引用:4難度:0.7
9.某質量為m的物體以初速度v0從斜面底部A點沿斜面上滑,當物體上滑到B點時速度大小為vB,滑到C點時速度為0。然后物體從C點下滑,到達AB中點D時速度大小又為vB,則下列說法正確的是( )組卷:128引用:4難度:0.7
三、解答題(共52分)
-
28.小紅利用如圖甲所示的電路探究“電流與電阻的關系”,滑動變阻器的規格為“50Ω,1A”改變電阻箱R的阻值依次為5Ω、10Ω、20Ω,多次實驗得數據如表。
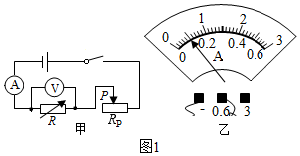
(1)開關閉合后電流表有示數而電壓表無示數,電路故障可能是 。實驗組別 1 2 3 電阻R(Ω) 5 10 20 電流I(A) 0.4 0.2
A.電流表壞了
B.滑動變阻器短路
C.電阻處接觸不良
D.電阻短路
(2)修正電路并完成第一組實驗,斷開開關,將電阻箱的阻值由5Ω調到10Ω。繼續操作有以下四步:
①閉合開關;
②將滑動變阻器的滑片移到最左端;
③記錄電流表示數;
④將滑動變阻器的滑片移到適當位置。
從安全和規范角度考慮,正確的順序是 。
(3)上述操作④中判斷滑片已處于適當位置的依據是 。本操作中滑動變阻器在實驗中的作用是 。
(4)在做第三次實驗時,電流指針如圖乙所示,此時通過R的電流為 A。
(5)依據表中數據作出了如圖圖象,能最直觀體現電流與電阻間關系的是 。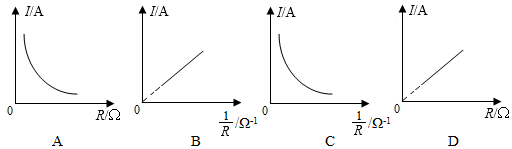
(6)要完成本次實驗,電源最多只能將 節干電池串聯。組卷:1152引用:10難度:0.5 -
 29.閱讀材料,回答問題。
29.閱讀材料,回答問題。
無人駕駛飛機無人駕駛飛機簡稱“無人機”,英文縮寫為“UAV”,是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機。無人機按應用領域,可分為軍用與民用。軍用方面,無人機分為偵察機和靶機;民用方面,無人機配合行業應用,是無人機真正的剛需,目前在航拍、農業、植保、自拍、快遞運輸、災難救援、觀察野生動物、監控傳染病、測繪、新聞報道、電力巡檢、救災、影視拍攝、制造浪漫等等領域的應用,大大的拓展了無人機本身的用途,發達國家也在積極擴展行業應用與發展無人機技術。
如圖所示是目前較為流行的一款四風葉的無人航拍機,當剩余電量減為電池容量的10%時,無人機會自動下降并停留地面等待充電,表一為本款無人機的部分參數,其中的電池容量是指放電電流與放電總時間的乘積。
表一:
無人機有豎直方向的三擋風力和水平方向的兩擋風力,其中豎直方向的風力與風葉轉速的平方成正比,對應關系如表二。產生的風力與風葉轉速之比叫做動率,升力與每秒鐘通過風葉空氣重之比為轉力效率。額定工作電壓 6V 額定功率 42W 電池容量 1500mAh 工作噪音 <50dB 風葉數量 4片 整機質量 500g 遙控距離 200m 飛行時間 6-12分鐘 充電時間 200分鐘 電能機械能轉化效率 90%
表二:
(1)無人機上升時,通過風葉將空氣向下吹動。當風葉轉速為1.2千轉/分鐘時,無人機可在空中勻速上升,此時無人機受空氣阻力為 N(g=10N/kg)。無人機水平向右做勻速直線運動的過程中,間隔相同時間從飛機上依次自由釋放編號為①②③的三個相同物體。不計空氣阻力,則圖2能正確表示物體著地位置的是 。風葉轉速(千轉/分鐘) 1 1.2 1.4 風力(牛頓) 4 動率(牛頓?分鐘/千轉) 4 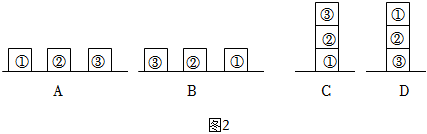
(2)該無人機正常工作時的電流為 A;充滿電后至下一次自動充電前能夠提供無人機工作的機械能為 J。
(3)由表二數據可知,當風量為1.4千轉/分鐘時,無人機的動率為 牛頓?分鐘/千轉。上述風量下,若風葉的轉圈半徑為30cm,空氣被吹動的速度為3m/s,則1min內通過風葉的空氣總質量為 kg,轉力效率為 。(取圓周率π=3,g=10N/kg,ρ空氣=1.3kg/m3)
(4)光敏電阻是制作感光器材的常用元件,其阻值隨受光強度的增加減少。在無人機的航拍鏡頭中,加入光敏電阻電路可自動控制進入鏡頭的光強度,電子鏡頭的透光能力隨著受控電壓的增加而增加。如圖3所示,RG為光敏電阻,R0為定值電阻,無人機的航拍鏡頭中將電子鏡頭電路與 電阻(填“光敏”或“定值”)相并聯。電源電壓U恒定,電子鏡頭電路的電阻類似于電壓表的 電阻,當光敏電阻在20Ω~40Ω變化時,電子鏡頭電路所獲電壓分別在3V~4V內變化,則定值電阻R0=Ω;當光敏電阻均勻變化時,電子鏡頭電路所獲電壓將 變化(選填“均勻”、“不均勻”或“無法判斷”)。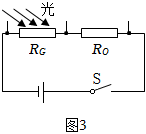 組卷:140引用:1難度:0.3
組卷:140引用:1難度:0.3